

简介
为避免导线舞动扭转导致计算出的相对位移与实际运动偏差,设计了基于惯性传感器的导线舞动监测系统,对系统中的导线舞动无线监测传感器、导线舞动状态监测装置(CMD)、状态监测代理(CMA)等部分进行了硬件设计和舞动定位算法设计。利用惯性传感器设计,既考虑了导线自激振荡引起的舞动,也考虑了导线扭转运动引起的舞动。搭建了模拟导线舞动的测试“,对系统可行性进行了测试,并对采用加速度传感器和惯性传感器2种方法进行比较,通过模拟实验结果表明:系统可有效对舞动进行监测,仅采用加速度传感器测量和计算的位移偏大,而利用惯性传感器测量和计算的位移更精确。此系统已在贵州电网山麻I回220 kV线路女装,目前运行良好。
随着我国超高压输电线路建设发展,导线舞动引起的事故经常出现。近些年来,我国受大范围低温、雨雪、冰冻等恶劣天气的影响,多省份输电线路出现了大面积的覆冰、舞动现象,其中舞动使得多条线路发生闪络跳闸、塔材螺栓松动、绝缘了碰撞破损、跳线断裂、问隔棒等金具损坏断裂、掉串掉线、杆塔结构受损、倒塔等不同等级的事故,给电网造成了严重的灾害1。
自20世纪30年代起,国外学者开始对导线舞动进行了大量实验和理论研究,我国有关舞动的记载始于20世纪50年代。相关研究人员先后提出了多种导线舞动监测方法,包括计算机3维仿真、图像视频法、加速度传感器监测法等。其中计算机3维仿真法可对导线的起舞过程和重要参量进行计算和仿真,但难以建立通用的数学模型;图像视频法是CAG工作人员通过安装在杆塔上的摄像机拍摄图片来获取导线运动状态,判断是否发生舞动,此方法较为直观,但只能定性地描述舞动运动状态;为定量描述导线运动状态,当今通常是用加速度传感器求得导线舞动轨迹。然而在实际应用中发现,随着导线运动,加速度传感器不可避免地发生扭转,造成测得数据不在同一个参考系下,由此计算得出的位移和实际运动偏差很大。针对此现象, 设计了采用惯性传感器的舞动监测系统,它既考虑了导线白激振荡引起的舞动,也考虑了导线扭转运动引起的舞动。通过惯性传感器采集导线舞动时的特征量,如加速度和角加速度,经数据分析解算得到物体的实时位置、姿态等信息,进而实现输电导线运动轨迹的精确还原。
输电线路舞动在线监测系统架构导线舞动在线监测系统可以准确实现导线舞动幅值、频率等信息采集,其总体架构见图1,系统包括导线舞动无线传感器、气象传感器、导线舞动状态监测装置(condition monitoring device,CMD)(数量为n)、状态监测代理(condition moni-toring agent,CMA)、状态信息接入网关机(condition information acquisition gateway,CAG)、通信网络等。其中导线舞动监测装置及各类气象传感器均安装在杆塔上,气象传感器通过RS485与导线舞动CMD连接。导线舞动无线传感器安装在运行导线上,其数量根据实际导线长度确定。导线舞动CMD利用ZigBee技术主动呼叫导线舞动无线传感器,各个导线舞动传感器同步完成导线舞动加速度(最多安装7个节点)信息采集,通过ZigBee网络将加速度数据发送给导线舞动CMD。传感器完成加速度的一次和二次积分得到速度和位移信息,由CMD将加速度、速度、位移和环境等参数打包,通过GPRS/CDM刀3G/wiFi/光纤等方式传输到CMA,通过CMA将信息发送至CAG,CAG专家软件通过线路拟合分析,得到导线舞动轨迹,计算得到导线舞动幅值、频率等信息。
导线舞动无线传感器设计所设计的导线舞动无线传感器安装在导线上,是由主控制器DSP、电源、惯性传感器和ZigBee通信组成,如图2所示。
主控制器选用TI公司的低功耗芯片TMS320F28335,它采用哈佛流水线结构,能够快速执行中断响应;惯性传感器ADIS16365采集并输出导线舞动的三轴加速度和角加速度,然后通过SPI串行通信协议把采集到的数据传送到主控制器DSP, DSP将接收到的信号通过ZigBee通信发送至导线舞动CMD o2.生传感器ADIS16365
ADIS16365是ADI公司推出的由三轴陀螺仪和三轴加速度计组成的惯性传感器。系统中ADIS16365通过SPI与DSP通讯,SPI电气连接图如图3所示,其中DSP设置为主机,传感器设置为从机。舞动信号的频率一般在0.1一3 Hz,因此 将采样频率设置为819.2 Hz,能够精确采集舞动特征量。每个采样周期后,传感器数据被载入输出寄存器,并且DIO1产生高电平脉冲,从而提供新的数据就绪控制信号,以驱动系统级中断服务程序。 惯性传感器收到DSP写进来的数据采集命令后便开始采集。 设计的舞动监测系统是针对导线6白由度的数据采集,即X, Y, Z轴加速度和角加速度,而ADIS16365反映三轴角加速度的寄存器地址分别是OX400(X轴),OX600(Y轴),OX800(Z轴),反映三轴加速度的寄存器地址分别是OXA00(X轴),OXC00(Y轴),OXE00(Z轴),要想得到导线舞动的三轴角加速度与加速度,按照时序读出相应寄存器地址的数据即可。
电源设计由于导线舞动无线传感器是长期安装在野外的,架空输电线路导线上的装置取电比较困难,因此本论文设计的导线舞动无线传感器电源设计采取的是导线取能加铿电池就地取电和供电,此方法将一次侧很大的交流电互感为较小的交流电,供后续电路使用,同时起到电气隔离的作用,不会对线路造成不良影响。
导线取能采用电磁感应原理,在输电导线上安装一个开环的互感器,互感出的交流电经过后续的整流、滤波、稳压电路输出稳定的电压,如图5所示。互感线圈输出的电能随导线电流的变化而变化。一方面,当输电线路发生短路或运维部门采用交流融冰时,导线电流过大,互感线圈的输出电压会超过稳压电路的耐压值,以至于损坏后级电路,因此需要增加过压过流保护电路来保护稳压电路;另一方面,当线路停电或采用直流融冰时,导线电流为零或为直流,互感线圈的磁通量变化率为零,互感器将停止输出,因此,为保证导线舞动无线传感器正常工作,电源模块增加了4节并联的铿电池,总容量达10.4 Ah,从而满足导线舞动无线传感器的工作需求1。
整个电源电路中,过冲保护路由瞬态抑制二极管实现的;整流电路采用单相全桥整流电路;过流过压保护电路是由2个MOS管T1, T2作为开关,以1个运算放大器和电压比较器做辅助电路组成;经高效的降压芯片LM2576输出,为导线舞动传感器提供电源,在蓄电池的电压不足时,也可给其充电。
ZigBee通信常用的无线通信方式有GPRS, 3G, WiFi、蓝牙和ZigB ee等,考虑到系统装置是安装在输电线路上,必须确保装置的功耗使其工作稳定,充分利用ZigB ee的低功耗特性,实现导线舞动无线传感器的设计。系统选用美国DiGi公司推出的低功耗2,远距离XBee-PRO模块。在输电线路中,2基杆塔常颊距离在400 m左右,对于档距较短的导线,舞动传感器可以直接与杆塔的导线舞动CMD通讯,对于档距大的导线,例如1 000 m以上的大跨越线路,可利用ZigBee组网,组成星形或树形网络,舞动传感器通过路由节点与导线舞动CMD通讯,实现滩确无误的数据传输。
导线舞动CMD导线舞动CMD是安装在杆塔上,负责导线舞动无线传感器和气象传感器数据的收发,主要由以ARM处理器为核心,外加电源模块、通信模块以及其他外围模块组成。CMD采用太阳能和蓄电池结合的供电方式,ARM处理器接收到导线舞动无线传感器以及气象传感器的数据后经WiFi/RS485/wimax发送至CMA。 为实现低功耗,导线舞动无线传感器上电后即向导线舞动CMD发送校时请求,在校时成功后关闭通信模块,待采集时问到达时打开通信模块,进行数据的采集与处理,最后各个传感器根据ID号分时向CMD上传数据。
CMA设计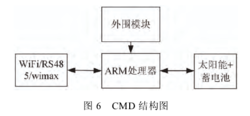 本系统的CMA安装在杆塔上,主要通过I1协议接收输电导线舞动CMD的信息,然后将其打包,通过有线(光纤)/无线(GPRS, CDMA, 3G等)方式以I2协议将其传至状态信息接入CAG。
本系统的CMA安装在杆塔上,主要通过I1协议接收输电导线舞动CMD的信息,然后将其打包,通过有线(光纤)/无线(GPRS, CDMA, 3G等)方式以I2协议将其传至状态信息接入CAG。
CMA的硬件是基于ARM处理器设计的,由微处理器、I1接口模块、I2接口模块、数据存储及电源管理等组成。I1协议为CMD和CMA之问的协议,I2协议为CMA向上一级传输信息时遵循的协议。
CMA与CMD的通信可根据两者的距离选择合适的通信方式。I1物理接口包括用于近距离传输的RS485接口、ZigB ee接口和WiFi接口、以及远距离传输的以太网接口。CMA与CAG的远距离通信遵循I2协议,I2物理接口包括GPRS/CDMA/3 G等无线通信接口以及以太网接口。本系统CMA电源设计与导线舞动CMD电源设计相似,也是采用太阳能加蓄电池的供电方式。但是CMA包含了更多通讯接口(GPRS, WiFi、以太网等模块)理论上需要更多的电能使其稳定运行,而这些接口并不需要同时工作,因此 设计的CMA通过电了开关控制不同电源芯片,实现各个通信模块单独供电,从而降低CMA的功耗。
舞动定位算法设计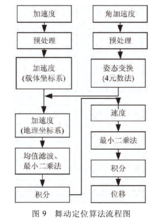 舞动轨迹还原算法设计流程图见图9,首先对采集到的加速度值采用均值法或5点3次平滑法的数字滤波技术进行数据预处理,其次对采集到的角速率值进行数据预处理,消除趋势项和直流分量,得到载体坐标下的加速度值,将载体坐标系下的加速度经姿态变换转换成地理坐标系下的值,然后利用时域积分将加速度值转换为位移。上述算法的关键在于姿态矩阵的求取, 采用4元数法得出载体坐标系和地理坐标系的实时姿态矩阵。设地理坐标系下3个单位矢量分别为ex, ey, eZ,则地理坐标系下矢量R=xex+yey+zeZ。
舞动轨迹还原算法设计流程图见图9,首先对采集到的加速度值采用均值法或5点3次平滑法的数字滤波技术进行数据预处理,其次对采集到的角速率值进行数据预处理,消除趋势项和直流分量,得到载体坐标下的加速度值,将载体坐标系下的加速度经姿态变换转换成地理坐标系下的值,然后利用时域积分将加速度值转换为位移。上述算法的关键在于姿态矩阵的求取, 采用4元数法得出载体坐标系和地理坐标系的实时姿态矩阵。设地理坐标系下3个单位矢量分别为ex, ey, eZ,则地理坐标系下矢量R=xex+yey+zeZ。
应用上述算法得到的速度和位移,监控中心根据1个档距内的多个节点数据得到整条导线舞动的轨迹,并显示在专家界面上,可实时得到导线的运动情况,如图10所示。通常舞动半波数主要有1个、2个、3个、4个等4种,5个及以上半波数的舞动尽管也会出现,但一般舞幅较小,不致引起线路故障,故可不予考虑,所以在工程运用中,一个档距内安装5^-8个节点就可满足轨迹还原要求,如遇到大跨越的地形可适量增加。
总结1)提出了一种采用惯性传感器的导线舞动在线监测系统的设计,解决了导线扭转带来的测量误差问题,实现了系统各部分硬件设计以及舞动定位算法的设计。
2)运用4元数法进行姿态矩阵求解,即载体坐标系与地理坐标系的转化,计算得到了统一坐标系即载体坐标系下的加速度。
3)搭建了实验平台,验证了系统可行性,可以监测导线舞动状态。通过实验验证,在导线扭转时,采用加速度传感器测量和计算的位移偏大,而利用惯性传感器测量和计算的位移更精确2。
4) 将广泛应用于航空、航天、航海及许多民用领域的惯性技术应用于输电线路状态监测技术中,为输电线路导线状态监测与诊断提供了一种新思路。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国